Mehaničko djelovanje tijela jedno na drugo uvijek je njihova interakcija.
Ako tijelo 1 djeluje na tijelo 2, onda tijelo 2 nužno djeluje na tijelo 1.
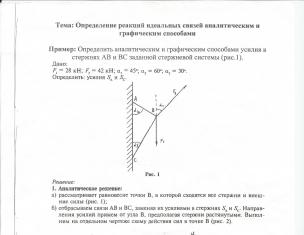
Na primjer,na pogonske kotače električne lokomotive (slika 2.3) djeluju statičke sile trenja iz šina, usmjerene prema kretanju električne lokomotive. Zbir ovih sila je vučna sila električne lokomotive. Zauzvrat, pogonski kotači djeluju na šine statičkim silama trenja usmjerenim u suprotnom smjeru.
Kvantitativni opis mehaničke interakcije dao je Newton u svojoj knjizi treći zakon dinamike.
Za materijalne tačke ovaj zakon je formulisana dakle:
Dvije materijalne tačke djeluju jedna na drugu sa silama jednakim po veličini i usmjerenim suprotno duž prave linije koja povezuje ove tačke(Sl.2.4):  .
.
 Treći zakon nije uvijek istinit.
Treći zakon nije uvijek istinit.
Izvedeno strogo
u slučaju kontaktnih interakcija,
tokom interakcije tijela koja miruju na određenoj udaljenosti jedno od drugog.
Pređimo sa dinamike jedne materijalne tačke na dinamiku mehanički sistem, koji se sastoji od
 materijalne tačke.
materijalne tačke.
Za  -od te materijalne tačke sistema, prema drugom Newtonovom zakonu (2.5), imamo:
-od te materijalne tačke sistema, prema drugom Newtonovom zakonu (2.5), imamo:
 .
(2.6)
.
(2.6)
Evo  I
I  - masa i brzina
- masa i brzina  - tu materijalnu tačku,
- tu materijalnu tačku,  - zbir svih sila koje na njega djeluju.
- zbir svih sila koje na njega djeluju.
Sile koje djeluju na mehanički sistem dijele se na vanjske i unutrašnje. Vanjske sile djeluju na tačke mehaničkog sistema od drugih, vanjskih tijela.
Unutrašnje sile djeluju između tačaka samog sistema.
Onda sila  u izrazu (2.6) može se predstaviti kao zbir vanjskih i unutrašnje sile:
u izrazu (2.6) može se predstaviti kao zbir vanjskih i unutrašnje sile:
 ,
(2.7)
,
(2.7)
Gdje  –
rezultat svega spoljne sile, djelujući na
–
rezultat svega spoljne sile, djelujući na  - ta tačka sistema;
- ta tačka sistema;
 -
unutrašnja sila koja na ovu tačku djeluje sa strane
-
unutrašnja sila koja na ovu tačku djeluje sa strane
 th.
th.
Zamijenimo izraz (2.7) u (2.6):
 ,
(2.8)
,
(2.8)
zbrajajući levu i desnu stranu jednačine (2.8), napisane za sve  materijalne tačke sistema, dobijamo
materijalne tačke sistema, dobijamo
 .
(2.9)
.
(2.9)
Prema trećem Newtonovom zakonu, interakcijske sile  -to i
-to i  -tačke sistema su jednake po veličini i suprotne po pravcu
-tačke sistema su jednake po veličini i suprotne po pravcu  .
.
Dakle, zbir svih unutrašnjih sila u jednačini (2.9) jednak je nuli:
 .
(2.10)
.
(2.10)
Zove se vektorski zbir svih vanjskih sila koje djeluju na sistem glavni vektor spoljnih sila
 .
(2.11)
.
(2.11)
Obrnutim operacijama sumiranja i diferencijacije u izrazu (2.9) i uzimajući u obzir rezultate (2.10) i (2.11), kao i definiciju impulsa mehaničkog sistema (2.3), dobijamo

- osnovna jednadžba dinamike translacijskog kretanja solidan.
Ova jednačina izražava zakon promjene količine kretanja mehaničkog sistema: vremenski izvod impulsa mehaničkog sistema jednak je glavnom vektoru vanjskih sila koje djeluju na sistem.
2.6. Centar mase i zakon njegovog kretanja.
Centar mase(inercija) mehaničkog sistema naziva se dot  , čiji je radijus vektor jednak omjeru zbira proizvoda masa svih materijalnih tačaka sistema sa njihovim vektorima radijusa i mase cijelog sistema:
, čiji je radijus vektor jednak omjeru zbira proizvoda masa svih materijalnih tačaka sistema sa njihovim vektorima radijusa i mase cijelog sistema:
 (2.12)
(2.12)
Gdje  I
I
 - vektor mase i radijusa
- vektor mase i radijusa  - tu materijalnu tačku,
- tu materijalnu tačku,
 -ukupan broj ovih bodova,
-ukupan broj ovih bodova,
 –ukupna masa sistema.
–ukupna masa sistema.
Ako su radijus vektori povučeni iz centra mase  , To
, To  .
.
dakle, centar mase je geometrijska tačka , za koje je zbir proizvoda masa svih materijalnih tačaka koje formiraju mehanički sistem po njihovim radijus vektorima povučenim iz ove tačke jednak nuli.
U slučaju kontinuirane raspodjele mase u sistemu (u slučaju ispruženog tijela), vektor radijusa centra mase sistema je:
 ,
,
Gdje r– radijus vektor malog elementa sistema čija je masa jednakadm, integracija se vrši nad svim elementima sistema, tj. kroz cijelu masu m.
Dobijamo formulu diferenciranja (2.12) s obzirom na vrijeme
izraz za centar mase brzine:

Centar mase brzine mehaničkog sistema jednak je odnosu količine gibanja ovog sistema i njegove mase.
Onda sistemski impulsjednak je umnošku njegove mase i brzine centra mase:
 .
.
Zamjenjujući ovaj izraz u osnovnu jednačinu dinamike translacijskog kretanja krutog tijela, imamo:
 (2.13)
(2.13)
- centar mase mehaničkog sistema kreće se kao materijalna tačka, čija je masa jednaka masi cijelog sistema i na koju djeluje sila jednaka glavnom vektoru vanjskih sila primijenjenih na sistem.
Jednačina (2.13) pokazuje da je za promjenu brzine centra mase sistema potrebno da na sistem djeluje vanjska sila. Unutrašnje sile interakcije između delova sistema mogu izazvati promene u brzinama ovih delova, ali ne mogu uticati na ukupni impuls sistema i brzinu njegovog centra mase.
Ako je mehanički sistem zatvoren, onda  a brzina centra mase se ne mijenja tokom vremena.
a brzina centra mase se ne mijenja tokom vremena.
dakle, centar mase zatvorenog sistema bilo u mirovanju ili kretanju konstantnom brzinom u odnosu na inercijski referentni okvir. To znači da se referentni sistem može povezati sa centrom mase, a ovaj sistem će biti inercijalan.
A) krug.
C) parabola.
D) putanja može biti bilo koja.
E) ravno.
2. Ako su tijela odvojena bezvazdušnim prostorom, onda je moguć prijenos topline između njih
A) toplotna provodljivost i konvekcija.
B) zračenje.
C) toplotna provodljivost.
D) konvekcija i zračenje.
E) konvekcija.
3. Elektron i neutron imaju električnih naboja
A) elektron – negativan, neutron – pozitivan.
B) elektron i neutron – negativan.
C) elektron – pozitivan, neutron – negativan.
D) elektron i neutron – pozitivan.
E) elektron – negativan, neutron – nema naboj.
4. Struja potrebna za obavljanje posla jednaka 250 J sa sijalicom od 4V iu trajanju od 3 minuta je jednaka
5. Od atomsko jezgro kao rezultat spontane transformacije, jezgro atoma helija je izbačeno, kao rezultat sljedećeg radioaktivnog raspada
A) gama zračenje.
B) raspad dva protona.
C) alfa raspad.
D) raspad protona.
E) beta raspad.
6. Tačka nebeska sfera, koji je označen istim znakom kao i sazvežđe Rak, ovo je tačka
A) Parada planeta
B) prolećna ravnodnevica
C) jesenji ekvinocij
D) ljetni solsticij
E) zimski solsticij
7. Kretanje kamiona opisano je jednadžbama x1= - 270 + 12t, a kretanje pješaka uz stranu istog autoputa jednačinom x2= - 1,5t. Vrijeme sastanka je
8. Ako se tijelo baci naviše brzinom od 9 m/s, tada će dostići svoju maksimalnu visinu za (g = 10 m/s2)
9. Pod uticajem konstantna sila jednako 4 N, kretaće se tijelo mase 8 kg
A) jednoliko ubrzano sa ubrzanjem od 0,5 m/s2
B) jednoliko ubrzan sa ubrzanjem od 2 m/s2
C) jednoliko ubrzan sa ubrzanjem od 32 m/s2
D) jednoliko brzinom od 0,5 m/s
E) ravnomjerno brzinom od 2 m/s
10. Snaga vučnog motora trolejbusa je 86 kW. Posao koji motor može obaviti za 2 sata je
A) 619200 kJ.
C) 14400 kJ.
E) 17200 kJ.
11. Potencijalna energija elastično deformisanog tijela kada se deformacija poveća za 4 puta
A) neće se promijeniti.
B) će se smanjiti za 4 puta.
C) će se povećati 16 puta.
D) će se povećati za 4 puta.
E) će se smanjiti za 16 puta.
12. Kuglice mase m1 = 5 g i m2 = 25 g kreću se jedna prema drugoj brzinom υ1 = 8 m/s i υ2 = 4 m/s. Nakon neelastičnog udara, brzina lopte m1 je jednaka (smjer koordinatne ose poklapa se sa smjerom kretanja prvog tijela)
13. Kada mehaničke vibracije
A) je samo konstantna potencijalna energija
B) i potencijalna i kinetička energija su konstantne
C) samo kinetička energija je konstantna
D) samo je ukupna mehanička energija konstantna
E) energija je konstantna u prvoj polovini perioda
14. Ako je kalaj na tački topljenja, tada će za topljenje 4 kg biti potrebna količina topline jednaka (J/kg)
15. Električno polje intenziteta 0,2 N/C djeluje na naboj od 2 C silom
16. Instalirajte ispravan redosled elektromagnetnih talasa kako se frekvencija povećava
1) radio talasi, 2) vidljivo svetlo, 3) rendgenski zraci, 4) infracrveno zračenje, 5) ultraljubičasto zračenje
A) 4, 1, 5, 2, 3
B) 5, 4, 1, 2, 3
C) 3, 4, 5, 1, 2
D) 2, 1, 5, 3, 4
E) 1, 4, 2, 5, 3
17. Učenik seče lim primjenom sile od 40 N na drške makaza. Udaljenost od ose makaza do tačke primene sile je 35 cm, a rastojanje od ose makaza. na lim je 2,5 cm Sila potrebna za rezanje lima
18. Površina malog klipa hidraulične prese je 4 cm2, a površina velike 0,01 m2. Sila pritiska na velikom klipu je veća od sile pritiska na malom klipu
B) 0,0025 puta
E) 0,04 puta
19. Gas, koji se širi pri konstantnom pritisku od 200 Pa, izvršio je rad od 1000 J Ako je gas u početku zauzimao zapreminu od 1,5 m, tada je nova zapremina gasa jednaka.
20. Udaljenost od objekta do slike je 3 puta veća od udaljenosti od objekta do sočiva. Ovo je socivo...
A) bikonkavna
B) ravan
C) prikupljanje
D) rasipanje
E) ravno-konkavno
Odjeljak 1. "STATIKA"
Newtons
Krak sile je najkraća udaljenost od tačke do linije djelovanja sile
Proizvod sile na kraku jednak je momentu sile.
8. Formulirajte “pravilo desne ruke” za određivanje smjera momenta sile.
9. Kako se određuje glavni moment sistema sila u odnosu na tačku?
Glavna stvar u vezi centra je vektorska suma momenti svih sila primijenjenih na tijelo u odnosu na isti centar.
10. Šta se naziva par sila? Koliki je moment para sila? Da li to zavisi od izbora tačke? Koji je smjer i veličina momenta para sila?
Par sila je sistem sila u kojem su sile jednake, paralelne i suprotne jedna drugoj. Moment je jednak proizvodu jedne od sila na ramenu, ne zavisi od izbora tačke i usmeren je okomito na ravan u kojoj leži par.
11. State Poinsotova teorema.
Svaki sistem sila koje djeluju na apsolutno kruto tijelo može se zamijeniti jednom silom i jednim parom sila. U ovom slučaju, sila će biti glavni vektor, a moment para će biti glavni moment ovog sistema sila.12. Formulirati potrebne i dovoljne uslove za ravnotežu sistema sila.
Za ravnotežu ravnog sistema sila potrebno je i dovoljno da algebarski zbir projekcija svih sila na dvije koordinatne ose i algebarski zbir momenata svih sila u odnosu na proizvoljnu tačku budu jednaki nuli. Drugi oblik jednadžbe ravnoteže je jednakost sa nulom algebarskih suma momenata svih sila u odnosu na bilo koje tri tačke koje ne leže na istoj pravoj liniji
14. Koji se sistemi sila nazivaju ekvivalentnim?
Ako se, bez narušavanja stanja tela, jedan sistem sila (F 1, F 2, ..., F n) može zameniti drugim sistemom (P 1, P 2, ..., P n) i porokom obrnuto, onda se takvi sistemi sila nazivaju ekvivalentnim
15. Koja se sila naziva rezultantom ovog sistema sila?
Kada je sistem sila (F 1, F 2, ..., F n) ekvivalentan jednoj sili R, onda se R naziva. rezultantno. Rezultirajuća sila može zamijeniti djelovanje svih datih sila. Ali nema svaki sistem sila rezultantu.
16. Poznato je da je zbir projekcija svih sila primijenjenih na tijelo na datu osu jednak nuli. Koji je smjer rezultante takvog sistema?
17. Formulirajte aksiom inercije (Galileov princip inercije).
Pod uticajem sila koje se međusobno balansiraju, materijalna tačka (telo) miruje ili se kreće pravolinijski i jednoliko
28. Formulirajte aksiom ravnoteže između dvije sile.
Dvije sile primijenjene na apsolutno kruto tijelo bit će uravnotežene ako i samo ako su jednake po veličini, djeluju u istoj pravoj liniji i usmjerene su u suprotnim smjerovima
19. Da li je moguće prenijeti silu duž njene linije djelovanja bez promjene kinematičkog stanja apsolutno krutog tijela?
Bez promjene kinematičkog stanja apsolutno krutog tijela, sila se može prenijeti duž linije njegovog djelovanja, zadržavajući njen modul i smjer nepromijenjenim.
20. Formulirajte aksiom paralelograma sila.
Bez promjene stanja tijela, dvije sile primijenjene na jednu tačku mogu se zamijeniti jednom rezultantnom silom primijenjenom na istoj tački i jednakom njihovom geometrijskom zbroju
21. Kako je formulisan Njutnov treći zakon?
Svaka akcija ima jednaku i suprotnu reakciju
22. Koje čvrsto tijelo se naziva neslobodnim?
Sile koje djeluju između tijela sistema nazivaju se unutrašnjim.
Zglobna i pokretna podrška. Ova vrsta veze je strukturno izvedena u obliku cilindrične šarke koja se može slobodno kretati duž površine. Reakcija zglobnog pokretnog oslonca uvijek je usmjerena okomito na noseću površinu
Zglobno fiksni nosač. Reakcija zglobno fiksnog nosača predstavljena je u obliku nepoznatih komponenti i , čije su linije djelovanja paralelne ili se poklapaju s koordinatnim osama
29. Koja potpora se naziva kruto ugrađivanje (štipanje)?
Ovo je neobična vrsta veze, jer osim što sprječava kretanje u ravnini, kruta brtva sprječava rotaciju šipke (snopa) u odnosu na točku. Stoga se reakcija spajanja svodi ne samo na reakciju (,), već i na reaktivni moment
30. Koji oslonac se zove potisni ležaj?
Potisni ležaj i sferna šarka Ova vrsta veze može se predstaviti u obliku šipke sa sfernom površinom na kraju, koja je pričvršćena za oslonac koji je dio sferne šupljine. Kuglasta šarka sprječava kretanje u bilo kojem smjeru u prostoru, pa je njena reakcija predstavljena u obliku tri komponente , , , paralelne s odgovarajućim koordinatnim osa
31. Koji oslonac se naziva sferni zglob?
32. Koji sistem sila se naziva konvergentnim? Kako su formulisani uslovi ravnoteže za sistem konvergentnih sila?
Ako je (apsolutno kruto) tijelo u ravnoteži pod djelovanjem sistema ravnih triju neparalelnih sila (tj. sila, od kojih su najmanje dvije neparalelne), tada se njihove linije djelovanja seku u jednoj tački.
34. Koliki je zbir dvije paralelne sile usmjerene u istom smjeru? IN različite strane?
rezultanta dvije paralelne sile F 1 i F 2 istog smjera ima isti smjer, njen modul je jednak zbiru modula komponentnih sila, a tačka primjene dijeli segment između tačaka primjene sila na dijelove obrnuto proporcionalne modulima sila: R = F 1 + F 2 ; AC/BC=F 2 /F 1. Rezultanta dvije suprotno usmjerene paralelne sile ima smjer sile koji je veći po veličini i veličinu jednaku razlici veličina sila.
37. Kako je formuliran Varignonov teorem?
Ako je predmet ravni sistem sile se svode na rezultantu, tada je moment ove rezultante u odnosu na bilo koju tačku jednak algebarskom zbiru momenata svih sila datog sistema u odnosu na tu istu tačku.
40. Kako se određuje centar paralelnih sila?
Prema Varignonovoj teoremi
41. Kako se određuje težište čvrstog tijela?
45. Gdje je težište trougla?
Srednja tačka preseka
46. Gdje je težište piramide i konusa?
Odjeljak 2. “KINEMATIKA”
1. Šta se zove putanja tačke? Koje se kretanje tačke naziva pravolinijskim? Curvilinear?
Linija duž koje se materijal kreće dot , zove trajektorija .
Ako je putanja prava linija, tada se kretanje tačke naziva pravolinijski; ako je putanja kriva linija, tada se kretanje naziva krivolinijsko
2. Kako je definisan kartezijanski pravougaoni koordinatni sistem?
3. Kako se određuje apsolutna brzina tačke u stacionarnom (inercijskom) koordinatnom sistemu? Koji je smjer vektora brzine u odnosu na njegovu putanju? Koje su projekcije brzine tačke na Kartezijanskoj koordinatnoj osi?
Za tačku, ove zavisnosti su sledeće: apsolutna brzina tačke jednaka je geometrijskom zbroju relativne i prenosive brzine, odnosno:
![]()
![]() .
.
3. Kako se određuje apsolutno ubrzanje tačke u stacionarnom (inercijskom) koordinatnom sistemu? Koje su projekcije ubrzanja tačke na dekartskoj koordinatnoj osi?
5. Kako se vektor određuje ugaona brzina krutog tijela kada se rotira oko fiksne ose? Koji je smjer vektora ugaone brzine?
Ugaona brzina- vektorska fizička veličina koja karakteriše brzinu rotacije tijela. Vektor ugaone brzine u veličini jednaka uglu rotacija tijela u jedinici vremena:
a je usmjerena duž osi rotacije prema pravilu gimleta, odnosno u smjeru u koji bi se uvrtanje s desnim navojem zavilo da se okreće u istom smjeru.
6. Kako se određuje vektor ugaonog ubrzanja krutog tijela kada se rotira oko fiksne ose? Koji je smjer vektora ugaonog ubrzanja?
Kada se tijelo rotira oko fiksne ose, ugaono ubrzanje po veličini je jednako:

Vektor ugaonog ubrzanja α usmjeren je duž ose rotacije (u stranu kod ubrzane rotacije i u suprotnom smjeru kod spore rotacije).
Kada se okreće oko fiksne tačke, vektor ugaonog ubrzanja se definiše kao prvi izvod vektora ugaone brzine ω u odnosu na vreme, tj.
8. Koje su apsolutne, prenosive i relativne brzine tačke tokom njenog složenog kretanja?
9. Kako se određuju prenosiva i relativna ubrzanja pri složenom kretanju tačke?
10. Kako se određuje Coriolisovo ubrzanje pri složenom kretanju tačke?
11. Navedite Coriolisovu teoremu.
Teorema zbrajanja ubrzanja (Coriolisova teorema): ![]() , Gdje
, Gdje ![]() – Coriolisovo ubrzanje (Coriolisovo ubrzanje) – u slučaju netranslacijskog prijenosnog kretanja, apsolutno ubrzanje = geometrijski zbir prijenosnog, relativnog i Coriolisovog ubrzanja.
– Coriolisovo ubrzanje (Coriolisovo ubrzanje) – u slučaju netranslacijskog prijenosnog kretanja, apsolutno ubrzanje = geometrijski zbir prijenosnog, relativnog i Coriolisovog ubrzanja.
12. Pri kojim kretanjima su tačke jednake nuli:
a) tangencijalno ubrzanje?
b) normalno ubrzanje?
14. Koje kretanje tijela se naziva translacijskim? Kolike su brzine i ubrzanja tačaka tijela pri takvom kretanju?
16. Koje kretanje tijela se naziva rotacijskim? Kolike su brzine i ubrzanja tačaka tijela pri takvom kretanju?
17. Kako se izražavaju tangente i tangente? centripetalno ubrzanje tačke krutog tijela koje se okreću oko fiksne ose?
18. Kakav je to osjećaj locus tačke krutog tijela koje se okreću oko fiksne ose, čija je brzina in ovog trenutka imati iste veličine i u istom pravcu?
19. Koje kretanje tijela se naziva ravanparalelno? Kolike su brzine i ubrzanja tačaka tijela pri takvom kretanju?
20. Kako se određuje trenutni centar brzina? ravna figura, kreće se u svom avionu?
21. Kako možete grafički pronaći položaj trenutnog centra brzina ako su poznate brzine dvije tačke ravne figure?
22. Kolike će biti brzine tačaka ravne figure u slučaju kada je trenutno središte rotacije ove figure beskonačno udaljeno?
23. Kako su međusobno povezane projekcije brzina dvije tačke ravne figure na pravu liniju koja povezuje ove tačke?
24. S obzirom na dva boda ( A I IN) pokretne ravne figure, a poznato je da je brzina tačke A okomito na AB. Kako je usmjerena brzina tačke? IN?
Odjeljak 1. "STATIKA"
1. Koji faktori određuju silu koja djeluje na tijelo?
2. U kojim jedinicama se mjeri sila u SI sistemu?
Newtons
3. Koji je glavni vektor sistema sila? Kako konstruisati poligon sila za dati sistem sila?
Glavni vektor je vektorski zbir svih sila primijenjenih na tijelo
5. Šta se naziva momentom sile u odnosu na datu tačku? Koji je smjer momenta sile u odnosu na vektor sile i radijus vektor tačke primjene sile?
Moment sile u odnosu na tačku (centar) je vektor koji je brojčano jednak proizvodu modula sile po kraku, odnosno najkraćoj udaljenosti od navedene tačke do linije djelovanja sile . Usmjerena je okomito na ravan prostiranja sile i r.v. bodova.
6. U kom slučaju je moment sile u odnosu na tačku jednak nuli?
Kada je krak jednak 0 (Središte momenata nalazi se na liniji djelovanja sile)
7. Kako se određuje poluga sile u odnosu na tačku? Šta je proizvod sile i ruke?
Prema prvom Newtonovom zakonu, u inercijalnim referentnim okvirima, tijelo može promijeniti svoju brzinu samo ako druga tijela djeluju na njega. Međusobno djelovanje tijela jedno na drugo izražava se kvantitativno pomoću sljedećeg fizička količina, kao sila (). Sila može promijeniti brzinu tijela, i po veličini i po smjeru. Sila je vektorska veličina, ona ima modul (veličinu) i smjer. Smjer rezultujuće sile određuje smjer vektora ubrzanja tijela na koje dotična sila djeluje.
Osnovni zakon kojim se određuje smjer i veličina rezultantne sile je drugi Newtonov zakon:
gdje je m masa tijela na koje djeluje sila; - ubrzanje koje sila daje dotičnom tijelu. Suština drugog Newtonovog zakona je da sile koje djeluju na tijelo određuju promjenu brzine tijela, a ne samo njegove brzine. Mora se imati na umu da drugi Newtonov zakon radi za inercijalne referentne okvire.
Ako na tijelo djeluje više sila, tada njihovo zajedničko djelovanje karakterizira rezultantna sila. Pretpostavimo da na tijelo istovremeno djeluje više sila, a tijelo se kreće ubrzanjem jednakom vektorskom zbroju ubrzanja koja bi se pojavila pod utjecajem svake od sila posebno. Sile koje djeluju na tijelo i primijenjene na jednu tačku moraju se sabrati prema pravilu vektorskog sabiranja. Vektorski zbir svih sila koje djeluju na tijelo u jednom trenutku naziva se rezultantna sila ():
Kada na tijelo djeluje više sila, drugi Newtonov zakon se piše kao:

Rezultanta svih sila koje djeluju na tijelo može biti jednaka nuli ako postoji međusobna kompenzacija sila koje djeluju na tijelo. U ovom slučaju, tijelo se kreće s konstantna brzina ili miruje.
Kada se na crtežu prikazuju sile koje djeluju na tijelo, u slučaju ravnomjerno ubrzanog kretanja tijela, rezultantnu silu usmjerenu duž ubrzanja treba prikazati duže od suprotno usmjerene sile (zbir sila). U slučaju ravnomjernog kretanja (ili mirovanja), veličina vektora sila usmjerenih u suprotnim smjerovima je ista.
Da biste pronašli rezultujuću silu, na crtežu treba prikazati sve sile koje se moraju uzeti u obzir u zadatku koje djeluju na tijelo. Sile treba zbrajati prema pravilima vektorskog sabiranja.
Primjeri rješavanja zadataka na temu "Rezultantna sila"
PRIMJER 1
| Vježbajte | Mala loptica visi o niti, miruje. Koje sile djeluju na ovu loptu, opišite ih na crtežu. Kolika je rezultujuća sila primijenjena na tijelo? |
| Rješenje | Hajde da napravimo crtež. Razmotrimo referentni sistem povezan sa Zemljom. U našem slučaju ovaj referentni sistem se može smatrati inercijskim. Na lopticu okačenu na niti djeluju dvije sile: sila gravitacije usmjerena okomito prema dolje () i sila reakcije niti (sila zatezanja niti): . Pošto lopta miruje, sila gravitacije je uravnotežena silom zatezanja niti: Izraz (1.1) odgovara prvom Newtonovom zakonu: rezultantna sila primijenjena na tijelo koje miruje u inercijski sistem brojanje je nula. |
| Odgovori | Rezultantna sila primijenjena na loptu je nula. |

PRIMJER 2
| Vježbajte | Dvije sile djeluju na tijelo i i , gdje su konstantne veličine. . Kolika je rezultujuća sila primijenjena na tijelo? |
| Rješenje | Hajde da napravimo crtež. Budući da su vektori sile i okomiti jedni na druge, nalazimo dužinu rezultante kao: |

Učenicima nije uvijek jasno kako dolazi do sabiranja vektora. Djeca nemaju pojma šta se krije iza njih. Samo treba zapamtiti pravila, a ne razmišljati o suštini. Dakle, o principima sabiranja i oduzimanja vektorskih veličina potrebno je dosta znanja.
Dodavanje dva ili više vektora uvijek rezultira još jednim. Štaviše, uvijek će biti isti, bez obzira na to kako se pronađe.
Najčešće u školski kurs geometrija razmatra dodavanje dva vektora. Može se izvesti prema pravilu trougla ili paralelograma. Ovi crteži izgledaju drugačije, ali rezultat akcije je isti.
Kako dolazi do sabiranja pomoću pravila trougla?
Koristi se kada vektori nisu kolinearni. Odnosno, ne leže na istoj pravoj ili na paralelnoj liniji.
U ovom slučaju, prvi vektor mora biti iscrtan iz neke proizvoljne tačke. Od njegovog kraja potrebno je povući paralelu i jednaku drugoj. Rezultat će biti vektor koji počinje od početka prvog i završava se na kraju drugog. Uzorak liči na trokut. Otuda i naziv pravila.
Ako su vektori kolinearni, onda se ovo pravilo također može primijeniti. Samo će crtež biti smješten duž jedne linije.
Kako se vrši sabiranje pomoću pravila paralelograma?
Još jednom? odnosi se samo na nekolinearne vektore. Izgradnja se izvodi po drugačijem principu. Iako je početak isti. Moramo ostaviti po strani prvi vektor. I od svog početka - drugi. Na osnovu njih dovršite paralelogram i nacrtajte dijagonalu od početka oba vektora. Ovo će biti rezultat. Ovako se vrši sabiranje vektora prema pravilu paralelograma.

Do sada su bila dva. Ali šta ako ih ima 3 ili 10? Koristite sljedeću tehniku.
Kako i kada se primjenjuje pravilo poligona?
Ako trebate izvršiti sabiranje vektora, čiji je broj veći od dva, ne bojte se. Dovoljno ih je sve redom odložiti i povezati početak lanca s njegovim krajem. Ovaj vektor će biti traženi zbir.
Koja svojstva vrijede za operacije s vektorima?
O nultom vektoru.Što kaže da kada se tome doda, dobije se original.
O suprotnom vektoru. To jest, onaj koji ima suprotan smjer i jednaku veličinu. Njihov zbir će biti nula.
O komutativnosti sabiranja.Šta se od tada zna osnovna škola. Promjena položaja pojmova ne mijenja rezultat. Drugim riječima, nije važno koji vektor prvi odložiti. Odgovor će i dalje biti tačan i jedinstven.
O asocijativnosti sabiranja. Ovaj zakon vam omogućava da dodate sve vektore iz trojke u parovima i dodate im treći. Ako ovo napišete pomoću simbola, dobit ćete sljedeće:
prvi + (drugi + treći) = drugi + (prvi + treći) = treći + (prvi + drugi).

Šta se zna o vektorskoj razlici?
Ne postoji posebna operacija oduzimanja. To je zbog činjenice da je u suštini dodatak. Samo drugom od njih dat je suprotan smjer. I onda se sve radi kao da se razmatra dodavanje vektora. Stoga se o njihovoj razlici praktično i ne govori.
Kako bi se pojednostavio rad sa njihovim oduzimanjem, modificira se pravilo trokuta. Sada (pri oduzimanju) drugi vektor mora biti odvojen od početka prvog. Odgovor će biti onaj koji povezuje krajnju tačku minuenda sa istom onom kao i subtrahend. Iako ga možete odgoditi kao što je ranije opisano, jednostavno promjenom smjera sekunde.
Kako pronaći zbir i razliku vektora u koordinatama?
Problem daje koordinate vektora i zahtijeva pronalaženje njihovih vrijednosti za konačni rezultat. U ovom slučaju nema potrebe za izvođenjem konstrukcija. To jest, možete koristiti jednostavne formule koje opisuju pravilo za dodavanje vektora. izgledaju ovako:
a (x, y, z) + b (k, l, m) = c (x + k, y + l, z + m);
a (x, y, z) -b (k, l, m) = c (x-k, y-l, z-m).
Lako je vidjeti da koordinate samo treba dodati ili oduzeti ovisno o konkretnom zadatku.

Prvi primjer sa rješenjem
Stanje. Dat je pravougaonik ABCD. Njegove stranice su jednake 6 i 8 cm. Točka presjeka dijagonala je označena slovom O. Potrebno je izračunati razliku između vektora AO i VO.
Rješenje. Prvo morate nacrtati ove vektore. Oni su usmjereni od vrhova pravokutnika do točke presjeka dijagonala.
Ako pažljivo pogledate crtež, možete vidjeti da su vektori već spojeni tako da je drugi od njih u kontaktu s krajem prvog. Samo je njegov smjer pogrešan. Trebalo bi početi od ove tačke. Ovo je ako se vektori saberu, ali problem uključuje oduzimanje. Stani. Ova akcija znači da morate dodati suprotno usmjereni vektor. To znači da VO treba zamijeniti sa OV. I ispostavilo se da su dva vektora već formirala par stranica iz pravila trougla. Dakle, rezultat njihovog sabiranja, odnosno željene razlike je vektor AB.
I poklapa se sa stranom pravougaonika. Da biste zapisali svoj brojčani odgovor, trebat će vam sljedeće. Nacrtajte pravougaonik po dužini tako da veća strana bude horizontalna. Počnite numerisati vrhove od donjeg lijevog dijela i idite u smjeru suprotnom od kazaljke na satu. Tada će dužina vektora AB biti 8 cm.
Odgovori. Razlika između AO i VO je 8 cm.

Drugi primjer i njegovo detaljno rješenje
Stanje. Dijagonale romba ABCD su 12 i 16 cm Tačka njihovog presjeka označena je slovom O. Izračunajte dužinu vektora formiranog razlikom vektora AO i BO.
Rješenje. Neka je oznaka vrhova romba ista kao u prethodnom zadatku. Slično rješenju prvog primjera, ispada da je tražena razlika jednaka vektoru AB. A njegova dužina je nepoznata. Rješavanje problema se svelo na izračunavanje jedne od stranica romba.
U tu svrhu trebat ćete uzeti u obzir trokut ABO. Pravougaona je jer se dijagonale romba seku pod uglom od 90 stepeni. A njegove noge su jednake polovini dijagonala. To jest, 6 i 8 cm Tražena stranica u zadatku poklapa se sa hipotenuzom u ovom trokutu.
Da biste ga pronašli, trebat će vam Pitagorina teorema. Kvadrat hipotenuze bit će jednak zbiru brojeva 6 2 i 8 2. Nakon kvadriranja, dobijene vrijednosti su: 36 i 64. Njihov zbir je 100. Iz toga slijedi da je hipotenuza jednaka 10 cm.
Odgovori. Razlika između vektora AO i VO je 10 cm.
Treći primjer sa detaljnim rješenjem
Stanje. Izračunajte razliku i zbir dva vektora. Njihove koordinate su poznate: prva ima 1 i 2, druga ima 4 i 8.
Rješenje. Da biste pronašli zbroj, trebat ćete zbrojiti prvu i drugu koordinate u parovima. Rezultat će biti brojevi 5 i 10. Odgovor će biti vektor sa koordinatama (5; 10).
Za razliku, trebate oduzeti koordinate. Nakon izvođenja ove radnje dobiće se brojevi -3 i -6. Oni će biti koordinate željenog vektora.
Odgovori. Zbir vektora je (5; 10), njihova razlika je (-3; -6).

Četvrti primjer
Stanje. Dužina vektora AB je 6 cm, BC je 8 cm. Drugi je odložen od kraja prvog pod uglom od 90 stepeni. Izračunajte: a) razliku između modula vektora VA i BC i modula razlike između VA i BC; b) zbir istih modula i modul zbira.
Rješenje: a) Dužine vektora su već date u zadatku. Stoga nije teško izračunati njihovu razliku. 6 - 8 = -2. Situacija s modulom razlike je nešto složenija. Prvo morate saznati koji će vektor biti rezultat oduzimanja. U tu svrhu treba izdvojiti vektor BA koji je usmjeren u suprotnom smjeru AB. Zatim nacrtajte vektor BC sa njegovog kraja, usmjeravajući ga u smjeru suprotnom od prvobitnog. Rezultat oduzimanja je vektor CA. Njegov modul se može izračunati pomoću Pitagorine teoreme. Jednostavnim proračunom se dobije vrijednost od 10 cm.
b) Zbir modula vektora je jednak 14 cm Da bismo pronašli drugi odgovor, bit će potrebna neka transformacija. Vektor BA je suprotno usmjeren prema datom - AB. Oba vektora su usmjerena iz iste tačke. U ovoj situaciji možete koristiti pravilo paralelograma. Rezultat zbrajanja bit će dijagonala, a ne samo paralelogram, već pravougaonik. Njegove dijagonale su jednake, što znači da je modul sume isti kao u prethodnom pasusu.
Odgovor: a) -2 i 10 cm; b) 14 i 10 cm.