Niech będzie dany prostokątny układ współrzędnych.
Twierdzenie 1.1. Dla dowolnych dwóch punktów M 1 (x 1; y 1) i M 2 (x 2; y 2) płaszczyzny odległość d między nimi wyraża się wzorem
Dowód. Upuśćmy prostopadłe M 1 B i M 2 A odpowiednio z punktów M 1 i M 2
 na osi Oy i Ox i oznacz przez K punkt przecięcia linii M 1 B i M 2 A (ryc. 1.4). Możliwe są następujące przypadki:
na osi Oy i Ox i oznacz przez K punkt przecięcia linii M 1 B i M 2 A (ryc. 1.4). Możliwe są następujące przypadki:
1) Punkty M 1, M 2 i K są różne. Oczywiście punkt K ma współrzędne (x 2;y 1). Łatwo zauważyć, że M 1 K = ôx 2 – x 1 ô, M 2 K = ôу 2 – y 1 ô. Ponieważ ∆M 1 KM 2 jest prostokątne, to zgodnie z twierdzeniem Pitagorasa d = M 1 M 2 =  = .
= .
2) Punkt K pokrywa się z punktem M 2, ale różni się od punktu M 1 (ryc. 1.5). W tym przypadku y 2 = y 1
 oraz d = M 1 M 2 = M 1 K = ôx 2 – x 1 ô=
oraz d = M 1 M 2 = M 1 K = ôx 2 – x 1 ô=  =
=
3) Punkt K pokrywa się z punktem M 1, ale różni się od punktu M 2. W tym przypadku x 2 = x 1 i d =
M 1 M 2 = KM 2 = ôу 2 - y 1 ô=  = .
= .
4) Punkt M 2 pokrywa się z punktem M 1. Następnie x 1 = x 2, y 1 = y 2 i
re = M 1 M 2 = O = .
Podział segmentu pod tym względem.
Niech na płaszczyźnie będzie dany dowolny odcinek M 1 M 2 i niech M ─ dowolny jego punkt
 odcinek inny niż punkt M 2 (ryc. 1.6). Liczba l, określona przez równość l =
odcinek inny niż punkt M 2 (ryc. 1.6). Liczba l, określona przez równość l =  , zwany postawa, w którym punkcie M dzieli odcinek M 1 M 2.
, zwany postawa, w którym punkcie M dzieli odcinek M 1 M 2.
Twierdzenie 1.2. Jeżeli punkt M(x;y) dzieli odcinek M 1 M 2 względem l, to współrzędne tego punktu wyznaczają wzory
x =  , y =
, y =  ,
(4)
,
(4)
gdzie (x 1;y 1) ─ współrzędne punktu M 1, (x 2;y 2) ─ współrzędne punktu M 2.
Dowód. Udowodnimy pierwszy ze wzorów (4). Drugi wzór dowodzi się w podobny sposób. Istnieją dwa możliwe przypadki.
x = x 1 =  =
=  = .
= .
2) Linia prosta M 1 M 2 nie jest prostopadła do osi Wołu (ryc. 1.6). Obniżmy prostopadłe z punktów M 1, M, M 2 do osi Ox i oznaczmy punkty ich przecięcia z osią Ox odpowiednio jako P 1, P, P 2. Z twierdzenia o odcinkach proporcjonalnych  = l.
= l.
Ponieważ P 1 P = ôx – x 1 ô, PP 2 = ôx 2 – xô i liczby (x – x 1) i (x 2 – x) mają ten sam znak (przy x 1< х 2 они положительны, а при х 1 >x 2 są ujemne), wówczas
l = =  ,
,
x – x 1 = l(x 2 – x), x + lx = x 1 + lx 2,
x = .
Wniosek 1.2.1. Jeżeli M 1 (x 1;y 1) i M 2 (x 2;y 2) są dwoma dowolnymi punktami, a punkt M(x;y) jest środkiem odcinka M 1 M 2, to
x =  , y =
, y =  (5)
(5)
Dowód. Ponieważ M 1 M = M 2 M, to l = 1 i korzystając ze wzorów (4) otrzymujemy wzory (5).
Pole trójkąta.
Twierdzenie 1.3. Dla dowolnych punktów A(x 1;y 1), B(x 2;y 2) i C(x 3;y 3), które nie leżą na tej samej
prosta, obszar S trójkąt ABC wyrażone wzorem
S = ô(x 2 – x 1)(y 3 – y 1) – (x 3 – x 1)(y 2 – y 1)ô (6)
Dowód. Pole ∆ ABC pokazane na ryc. 1.7, obliczamy w następujący sposób
 S ABC = S ADEC + S BCEF – S ABFD .
S ABC = S ADEC + S BCEF – S ABFD .
Obliczamy powierzchnię trapezów:
ADEC =  ,
,
S BCEF = 
SABFD = 
Teraz mamy
S ABC = ((x 3 – x 1)(y 3 + y 1) + (x 3 – x 2)(y 3 + y 2) - (x 2 – -x 1) (y 1 + y 2)) = (x 3 y 3 – x 1 y 3 + x 3 y 1 – x 1 y 1 + + x 2 y 3 – -x 3 y 3 + x 2 y 2 – x 3 y 2 – x 2 y 1 + x 1 y 1 – x 2 y 2 + x 1 y 2) = (x 3 y 1 – x 3 y 2 + x 1 y 2 – x 2 y 1 + x 2 y 3 –
X 1 y 3) = (x 3 (y 1 – y 2) + x 1 y 2 – x 1 y 1 + x 1 y 1 – x 2 y 1 + y 3 (x 2 – x 1)) = (x 1 (y 2 – y 1) – x 3 (y 2 – y 1) + +y 1 (x 1 – x 2) – y 3 (x 1 – x 2)) = ((x 1 – x 3)( y 2 – y 1) + (x 1 – x 2)(y 1 – y 3)) = ((x 2 – x 1)(y 3 – y 1) –
- (x 3 – x 1)(y 2 – y 1)).
Dla innej lokalizacji ∆ ABC wzór (6) dowodzi się w podobny sposób, jednak może się okazać, że zostanie on postawiony ze znakiem „-”. Dlatego we wzorze (6) umieszcza się znak modułu.
Wykład 2.
Równanie prostej na płaszczyźnie: równanie prostej ze współczynnikiem głównym, równanie ogólne prosta, równanie prostej w odcinkach, równanie prostej przechodzącej przez dwa punkty. Kąt między prostymi, warunki równoległości i prostopadłości prostych na płaszczyźnie.
2.1. Niech na płaszczyźnie będzie dany prostokątny układ współrzędnych i jakaś prosta L.
Definicja 2.1. Nazywa się równanie w postaci F(x;y) = 0 łączące zmienne x i y równanie liniowe L(w danym układzie współrzędnych), jeżeli równanie to spełniają współrzędne dowolnego punktu leżącego na prostej L, a nie współrzędne dowolnego punktu nieleżącego na tej prostej.
Przykłady równań prostych na płaszczyźnie.
1) Rozważmy prostą równoległą do osi Oy prostokątnego układu współrzędnych (ryc. 2.1). Oznaczmy literą A punkt przecięcia tej prostej z osią Wołu, (a;o) ─ jej or-
 dynaty. Równanie x = a jest równaniem danej prostej. Rzeczywiście, równanie to jest spełnione przez współrzędne dowolnego punktu M(a;y) tej prostej i nie jest spełnione przez współrzędne żadnego punktu nie leżącego na tej prostej. Jeśli a = 0, to prosta pokrywa się z osią Oy, która ma równanie x = 0.
dynaty. Równanie x = a jest równaniem danej prostej. Rzeczywiście, równanie to jest spełnione przez współrzędne dowolnego punktu M(a;y) tej prostej i nie jest spełnione przez współrzędne żadnego punktu nie leżącego na tej prostej. Jeśli a = 0, to prosta pokrywa się z osią Oy, która ma równanie x = 0.
2) Równanie x - y = 0 definiuje zbiór punktów płaszczyzny tworzących dwusieczne kątów współrzędnych I i III.
3) Równanie x 2 - y 2 = 0 ─ jest równaniem dwóch dwusiecznych kątów współrzędnych.
4) Równanie x 2 + y 2 = 0 definiuje pojedynczy punkt O(0;0) na płaszczyźnie.
5) Równanie x 2 + y 2 = 25 ─ równanie koła o promieniu 5 ze środkiem w początku.
Za pomocą współrzędnych określa się lokalizację obiektu na kuli ziemskiej. Współrzędne są oznaczone szerokością i długością geograficzną. Szerokości geograficzne mierzone są od linii równika po obu stronach. Na półkuli północnej szerokości geograficzne są dodatnie, na półkuli południowej są ujemne. Długość geograficzną mierzy się odpowiednio od południka zerowego, odpowiednio na wschód lub zachód, uzyskuje się długość geograficzną wschodnią lub zachodnią.Zgodnie z ogólnie przyjętym stanowiskiem za południk zerowy przyjmuje się ten, który przechodzi przez stare Obserwatorium Greenwich w Greenwich. Współrzędne geograficzne lokalizacji można uzyskać za pomocą nawigatora GPS. Urządzenie to odbiera sygnały satelitarnego systemu pozycjonowania w jednolitym dla całego świata układzie współrzędnych WGS-84.
Modele Navigatorów różnią się producentem, funkcjonalnością i interfejsem. Obecnie wbudowane nawigatory GPS są dostępne także w niektórych modelach telefonów komórkowych. Ale każdy model może rejestrować i zapisywać współrzędne punktu.
Odległość między współrzędnymi GPS
Aby rozwiązać problemy praktyczne i teoretyczne w niektórych branżach, konieczna jest umiejętność wyznaczania odległości między punktami za pomocą ich współrzędnych. Można to zrobić na kilka sposobów. Forma reprezentacji kanonicznej współrzędne geograficzne: stopnie, minuty, sekundy.Przykładowo, możesz określić odległość pomiędzy następującymi współrzędnymi: punkt nr 1 - szerokość geograficzna 55°45′07″ N, długość geograficzna 37°36′56″ E; punkt nr 2 - szerokość geograficzna 58°00′02″ N, długość geograficzna 102°39′42″ E.
Najłatwiej jest użyć kalkulatora do obliczenia długości między dwoma punktami. W wyszukiwarce przeglądarki należy ustawić następujące parametry wyszukiwania: online - aby obliczyć odległość między dwoma współrzędnymi. W kalkulatorze online wartości szerokości i długości geograficznej są wprowadzane w polach zapytania dla pierwszej i drugiej współrzędnej. Podczas obliczeń kalkulator online dał wynik - 3 800 619 m.
Kolejna metoda jest bardziej pracochłonna, ale i bardziej wizualna. Należy skorzystać z dowolnego dostępnego programu do mapowania lub nawigacji. Do programów, w których można tworzyć punkty za pomocą współrzędnych i mierzyć odległości między nimi, zaliczają się następujące aplikacje: BaseCamp (nowoczesny odpowiednik programu MapSource), Google Earth, SAS.Planet.
Wszystkie powyższe programy są dostępne dla każdego użytkownika sieci. Na przykład, aby obliczyć odległość między dwoma współrzędnymi w Google Earth, musisz utworzyć dwie etykiety wskazujące współrzędne pierwszego i drugiego punktu. Następnie za pomocą narzędzia „Linijka” należy połączyć pierwszy i drugi znacznik linią, program automatycznie wyświetli wynik pomiaru i wskaże ścieżkę zdjęcie satelitarne Ziemia.
W przypadku podanego powyżej przykładu program Google Earth zwrócił wynik - długość odległości pomiędzy punktem nr 1 a punktem nr 2 wynosi 3 817 353 m.
Dlaczego przy określaniu odległości występuje błąd
Wszystkie obliczenia zasięgu pomiędzy współrzędnymi opierają się na obliczeniu długości łuku. Promień Ziemi bierze udział w obliczaniu długości łuku. Ponieważ jednak kształt Ziemi jest zbliżony do spłaszczonej elipsoidy, promień Ziemi zmienia się w niektórych punktach. Do obliczenia odległości pomiędzy współrzędnymi przyjmuje się średnią wartość promienia Ziemi, co daje błąd pomiaru. Im większa jest mierzona odległość, tym większy jest błąd.Niech , (rysunek 2.3). Wymagane do znalezienia.
Rysunek 2.3. Odległość między dwoma punktami.
Z prostokąta zgodnie z twierdzeniem Pitagorasa mamy
To jest ,
Formuła ta obowiązuje dla dowolnej lokalizacji punktów i .
II. Podział segmentu pod tym względem:
Pozwalać , . Należy znaleźć , leżący na odcinku i dzieląc go w zadanym stosunku (rysunek 2.4.).
Rysunek 2.4. Podział segmentu pod tym względem.
Z podobieństwa ~, czyli skąd. Podobnie.
Zatem,
– wzór na dzielenie odcinka względem .
Jeśli następnie
– współrzędne środka odcinka.
Komentarz. Wyprowadzone wzory można uogólnić na przypadek przestrzennego prostokątnego kartezjańskiego układu współrzędnych. Niech punkty , . Następnie
- wzór na znalezienie odległości między punktami i .
Wzór na dzielenie odcinka względem.
Oprócz kartezjańskich w samolocie i przestrzeni możesz konstruować duża liczba inne układy współrzędnych, czyli sposoby charakteryzowania położenia punktu na płaszczyźnie lub w przestrzeni za pomocą dwóch lub trzech parametrów numerycznych (współrzędnych). Rozważmy niektóre z istniejących układów współrzędnych.
W samolocie można to ustalić biegunowy układ współrzędnych , który jest stosowany w szczególności w badaniu ruchów obrotowych.
Rysunek 2.5. Biegunowy układ współrzędnych.
Ustalmy punkt na płaszczyźnie i wychodzącą z niego półprostą, a także wybierzmy jednostkę skali (rysunek 2.5). Punkt nazywa się Polak , półprosta – oś polarna . Przypiszmy dwie liczby do dowolnego punktu:
– promień biegunowy , równa odległości od punktu M do bieguna O;
– kąt polarny , równy kątowi między osią biegunową a półprostą.
Mierzony w radianach, zwykle zakłada się, że dodatni kierunek wartości jest liczony w kierunku przeciwnym do ruchu wskazówek zegara.
Promień biegunowy odpowiada biegunowi; kąt biegunowy nie jest dla niego zdefiniowany.
Znajdźmy związek między współrzędnymi prostokątnymi i biegunowymi (rysunek 2.6).
Rysunek 2.6. Zależność między prostokątnymi i biegunowymi układami współrzędnych.
Za początek prostokątnego układu współrzędnych uznamy biegun, a półprostą za oś biegunową. Niech - w prostokątnym kartezjańskim układzie współrzędnych i - w biegunowym układzie współrzędnych. Znajdźmy związek między współrzędnymi prostokątnymi i biegunowymi.
Z prostokąta i z prostokąta. Zatem formuły
wyrazić prostokątne współrzędne punktu w postaci jego współrzędnych biegunowych.
Odwrotną zależność wyrażają wzory
Komentarz. Kąt biegunowy można również wyznaczyć ze wzoru, uprzednio wyznaczając ze współrzędnych prostokątnych, w której ćwiartce leży punkt.
Przykład 1. Znajdź współrzędne biegunowe punktu.
Rozwiązanie. Obliczamy; Kąt biegunowy wyznacza się z warunków:
Dlatego, dlatego.
Przykład 2. Znajdź prostokątne współrzędne punktu.
Rozwiązanie. Obliczamy
Dostajemy.
W przestrzeni trójwymiarowej oprócz prostokątnego kartezjańskiego układu współrzędnych często stosuje się cylindryczne i sferyczne układy współrzędnych.
Cylindryczny układ współrzędnych jest biegunowym układem współrzędnych w płaszczyźnie, do którego dodaje się oś przestrzenną prostopadłą do tej płaszczyzny (rysunek 2.7). Położenie dowolnego punktu charakteryzują trzy liczby - jego współrzędne cylindryczne: , gdzie i są współrzędnymi biegunowymi (promień i kąt biegunowy) rzutu punktu na płaszczyznę, w której wybrany jest biegunowy układ współrzędnych - zastosowanie, która jest równa odległości punktu od określonej płaszczyzny.
Rysunek 2.7. Cylindryczny układ współrzędnych
Aby ustalić związek pomiędzy prostokątnym kartezjańskim układem współrzędnych a cylindrycznym, ustawiamy je względem siebie jak na rysunku 2.8 (umieszczamy płaszczyznę w płaszczyźnie, a oś biegunowa pokrywa się z dodatnim kierunkiem osi, oś jest powszechne w obu układach współrzędnych).
Niech będą prostokątnymi współrzędnymi punktu, będą współrzędnymi cylindrycznymi tego punktu i będą rzutem punktu na płaszczyznę. Następnie
wzory łączące współrzędne prostokątne i cylindryczne punktu.
Rysunek 2.8. Zależność między prostokątnym kartezjańskim
i cylindryczne układy współrzędnych
Komentarz. Przy rozważaniu ciał obrotowych często stosuje się współrzędne cylindryczne, których oś znajduje się wzdłuż osi obrotu.
Sferyczny układ współrzędnych można skonstruować w następujący sposób. Wybierzmy oś biegunową w płaszczyźnie. Przez punkt rysujemy linię prostą prostopadłą do płaszczyzny (normalnej). Wtedy dowolny punkt w przestrzeni można powiązać z trzema liczbami rzeczywistymi, gdzie jest to odległość od punktu do, kąt pomiędzy osią a rzutem odcinka na płaszczyznę oraz kąt pomiędzy normalną a odcinkiem. Zauważ, że , , .
Jeśli ustawimy płaszczyznę na płaszczyźnie i wybierzemy oś biegunową tak, aby pokrywała się z dodatnim kierunkiem osi, a następnie wybierzemy oś jako normalną (rysunek 2.9), otrzymamy wzory łączące te dwa układy współrzędnych
Rysunek 2.9. Zależność między sferą i prostokątem kartezjańskim
układy współrzędnych
wielkości skalarne, lub skalary są całkowicie scharakteryzowane przez ich wartość liczbową w wybranym układzie jednostek. Ilości wektorowe lub wektory, oprócz wartości liczbowej, mają również kierunek. Przykładowo, jeśli powiemy, że wiatr wieje z prędkością 10 m/s, to wprowadzimy wartość skalarną prędkości wiatru, natomiast jeśli powiemy, że wiatr południowo-zachodni wieje z prędkością 10 m/s, wówczas w tym przypadku prędkość wiatru będzie już wektorem.
Wektor nazywany segmentem skierowanym mającym określoną długość, tj. odcinek o określonej długości, w którym jeden z punktów ograniczających przyjmuje się za początek, a drugi za koniec. Będziemy oznaczać wektor albo (rysunek 2.10).
Długość wektora oznacza się symbolem lub i nazywa się modułem wektora. Nazywa się wektor, którego długość wynosi 1 pojedynczy . Wektor nazywa się zero , jeśli jego początek i koniec pokrywają się i jest oznaczony przez θ lub . Wektor zerowy nie ma określonego kierunku i ma długość równą zero. Nazywa się wektory i znajdujące się na tej samej linii lub na liniach równoległych współliniowy . Nazywa się te dwa wektory równy , jeśli są współliniowe, mają tę samą długość i ten sam kierunek. Wszystkie wektory zerowe uważa się za równe.
Nazywa się dwa wektory współliniowe, różne od zera, mające równe wielkości, ale przeciwne kierunki naprzeciwko . Przeciwny wektor jest oznaczony przez , dla przeciwnego wektora.
Do numeru operacje liniowe na wektorach obejmują operacje dodawania, odejmowania wektorów i mnożenia wektora przez liczbę, tj. operacje, których wynikiem jest wektor.
Zdefiniujmy wskazane operacje na wektorach. Niech dwa wektory i będą dane. Weźmy dowolny punkt O, skonstruujmy wektor i wykreślmy wektor z punktu A. Następnie wywoływany jest wektor łączący początek pierwszego wyrazu wektora z końcem drugiego kwota wektory te są oznaczone przez . Rozważana zasada znajdowania sumy wektorów nazywa się zasady trójkąta (Rysunek 2.11).
Tę samą sumę wektorów można otrzymać w inny sposób (rysunek 2.12). Wykreślmy wektor i wektor z punktu. Zbudujmy równoległobok na tych wektorach jak na bokach. Sumą będzie wektor będący przekątną równoległoboku narysowanego z wierzchołka. Ta reguła znajdowania sumy nazywa się zasady równoległoboku .
Każda ilość skończoną liczbą wektory można otrzymać stosując regułę linii łamanej (rysunek 2.13). Z dowolnego punktu wykreślamy wektor, następnie wykreślamy wektor itd. Wektor łączący początek pierwszego z końcem ostatniego jest sumą
| |
Przez różnicę dwa wektory i nazywany jest takim wektorem, którego suma z odjętym wektorem daje wektor. Stąd reguła konstruowania wektora różnicowego(Rysunek 2.14). Z punktu wykreślamy wektor i wektor . Różnicą jest wektor łączący końce wektora odejmowania i wektora odejmowania i skierowany od odejmowania do wektora odejmowania.
Iloczyn wektora NA prawdziwy numerλ jest wektorem współliniowym z wektorem, ma długość i ten sam kierunek co wektor jeśli , oraz kierunek przeciwny do wektora jeśli .
Weszła operacje liniowe ponad wektorami nieruchomości :
10 . Przemienność dodawania: .
20 . Łączność dodawania: .
trzydzieści . Istnienie pierwiastka neutralnego przez dodanie: .
4 0 . Istnienie przeciwnego elementu przez dodanie:
50 . Rozdzielność mnożenia przez liczbę ze względu na dodawanie wektorów: .
6 0 . Rozdzielność mnożenia wektora przez sumę dwóch liczb:
7 0 . Własność skojarzenia dotycząca mnożenia wektora przez iloczyn liczb: .
Niech będzie dany układ wektorów:
Wyrażenie, w którym λ i (i = 1,2,…, n) są pewnymi liczbami, nazywa się kombinacja liniowa układy wektorów (2.1). Nazywa się układ wektorów (2.1). liniowo zależne , jeżeli ich kombinacja liniowa jest równa zeru, pod warunkiem, że nie wszystkie liczby λ 1, λ 2, ..., λ n są równe zero. Nazywa się układ wektorów (2.1). liniowo niezależny , jeśli ich kombinacja liniowa jest równa zeru tylko wtedy, gdy wszystkie liczby λ i = 0 (). Można podać inną definicję zależność liniowa wektory. Nazywa się układ wektorów (2.1). liniowo zależne , jeśli dowolny wektor tego układu jest wyrażony liniowo w odniesieniu do pozostałych, w przeciwnym razie układ wektorów (2.1) liniowo niezależny .
Dla wektorów leżących na płaszczyźnie prawdziwe są następujące stwierdzenia.
10 . Dowolne trzy wektory na płaszczyźnie są liniowo zależne.
20 . Jeśli liczba tych wektorów na płaszczyźnie jest większa niż trzy, wówczas są one również liniowo zależne.
trzydzieści . Aby dwa wektory na płaszczyźnie były liniowo niezależne, konieczne i wystarczające jest, aby nie były one współliniowe.
Zatem maksymalna liczba liniowo niezależnych wektorów na płaszczyźnie wynosi dwa.
Wektory nazywane są współpłaszczyznowy , jeśli leżą w tej samej płaszczyźnie lub są równoległe do tej samej płaszczyzny. Poniższe stwierdzenia są prawdziwe dla wektorów przestrzennych.
10 . Co cztery wektory przestrzeni są liniowo zależne.
20 . Jeżeli liczba tych wektorów w przestrzeni jest większa niż cztery, to są one również liniowo zależne.
trzydzieści . Aby trzy wektory były liniowo niezależne, konieczne i wystarczające jest, aby nie były one współpłaszczyznowe.
Zatem maksymalna liczba liniowo niezależnych wektorów w przestrzeni wynosi trzy.
Nazywa się dowolny maksymalny podsystem liniowo niezależnych wektorów, poprzez który wyrażany jest dowolny wektor tego układu podstawa ten rozważany systemy wektorowe . Łatwo stwierdzić, że baza na płaszczyźnie składa się z dwóch niewspółliniowych wektorów, a baza w przestrzeni składa się z trzech niewspółpłaszczyznowych wektorów. Nazywa się liczbą wektorów bazowych ranga systemy wektorowe. Nazywa się współczynniki rozwinięcia wektora na wektory bazowe współrzędne wektora na tej podstawie.
Niech wektory tworzą bazę i niech , wówczas liczby λ 1, λ 2, λ 3 są współrzędnymi wektora w bazie.W tym przypadku napisz Można wykazać, że rozkład wektora w bazie jest unikalny . Główne znaczenie podstawy jest takie, że operacje liniowe na wektorach stają się zwykłymi operacjami liniowymi na liczbach - współrzędnymi tych wektorów. Korzystając z właściwości operacji liniowych na wektorach, możemy udowodnić następujące twierdzenie.
Twierdzenie. Po dodaniu dwóch wektorów dodawane są odpowiadające im współrzędne. Kiedy wektor jest mnożony przez liczbę, wszystkie jego współrzędne są mnożone przez tę liczbę.
Zatem jeśli i , to , gdzie i gdzie , λ jest pewną liczbą.
Zazwyczaj zbiór wszystkich wektorów w płaszczyźnie, sprowadzony do wspólnego początku, po wprowadzonych operacjach liniowych, oznacza się przez V 2, a zbiór wszystkich wektorów w przestrzeni, sprowadzony do wspólnego początku, oznacza się przez V 3. Zbiory V 2 i V 3 nazywane są przestrzenie wektorów geometrycznych.
Kąt między wektorami i nazywany jest najmniejszym kątem (), o który należy obrócić jeden z wektorów, aż zbiegnie się z drugim po doprowadzeniu tych wektorów do wspólnego początku.
Produkt kropkowy dwa wektory to liczba równa iloczynowi modułów tych wektorów i cosinusa kąta między nimi. Iloczyn skalarny wektorów i jest oznaczony przez , lub
Jeżeli kąt między wektorami i jest równy , to
Z punkt geometryczny Z punktu widzenia iloczyn skalarny wektorów jest równy iloczynowi modułu jednego wektora i rzutu na niego innego wektora. Z równości (2.2) wynika, że
Stąd warunek ortogonalności dwóch wektorów: dwa wektory I są ortogonalne wtedy i tylko wtedy, gdy ich iloczyn skalarny jest równy zeru, tj. .
Iloczyn skalarny wektorów nie jest operacją liniową, ponieważ jej wynikiem jest liczba, a nie wektor.
Właściwości iloczynu skalarnego.
1°. – przemienność.
2°. – dystrybutywność.
3°. – łączność ze względu na czynnik numeryczny.
4°. - własność kwadratu skalarnego.
Z własności 4° wynika definicja długość wektora :
Niech podstawa zostanie podana w przestrzeni V 3, gdzie wektory są wektorami jednostkowymi (nazywa się je wektorami jednostkowymi), kierunek każdego z nich pokrywa się z dodatnim kierunkiem osi współrzędnych Ox, Oy, Oz prostokątnej współrzędnej kartezjańskiej system.
Rozwińmy wektor przestrzenny V 3 zgodnie z tą bazą (rysunek 2.15):
Wektory nazywane są składnikami wektorów wzdłuż osi współrzędnych lub składnikami liczb ax, ay, az– prostokątne kartezjańskie współrzędne wektora A. Kierunek wektora wyznaczają kąty α, β, γ utworzone przez niego z liniami współrzędnych. Cosinus tych kątów nazywany jest wektorem kierunku. Następnie cosinusy kierunku wyznacza się za pomocą wzorów:
Łatwo to pokazać
Wyraźmy iloczyn skalarny w formie współrzędnych.
Niech będzie. Mnożąc te wektory jako wielomiany i biorąc pod uwagę, że otrzymujemy wyrażenie do znalezienia iloczyn skalarny w formie współrzędnych:
te. iloczyn skalarny dwóch wektorów jest równy sumie sparowanych iloczynów współrzędnych o tej samej nazwie.
Z (2.6) i (2.4) wynika wzór na znalezienie długość wektora :
Z (2.6) i (2.7) otrzymujemy wzór na określenie kąt między wektorami:
Trójka wektorów nazywana jest uporządkowaną, jeśli wskazano, który z nich jest uważany za pierwszy, który za drugi, a który za trzeci.
Zamówione trzy wektory zwany Prawidłowy , jeżeli po doprowadzeniu ich do wspólnego początku z końca trzeciego wektora, najkrótszy obrót od pierwszego do drugiego wektora wykonuje się w kierunku przeciwnym do ruchu wskazówek zegara. W przeciwnym razie nazywana jest trójka wektorów lewy . Na przykład na rysunku 2.15 wektory , , tworzą prawą trójkę wektorów, a wektory , , tworzą lewą trójkę wektorów.
W podobny sposób wprowadza się koncepcję prawego i lewego układu współrzędnych w przestrzeni trójwymiarowej.
Grafika wektorowa wektor po wektorze to wektor (inny zapis), który:
1) ma długość , gdzie jest kątem między wektorami i ;
2) prostopadle do wektorów i (), tj. jest prostopadła do płaszczyzny, w której wektory i ;
Z definicji znajdujemy iloczyn wektorowy wektorów jednostek współrzędnych , , :
Jeżeli , , to współrzędne iloczynu wektora i wektora wyznacza się według wzoru:
Z definicji wynika geometryczne znaczenie grafiki wektorowej : moduł wektorowy równa powierzchni równoległobok zbudowany na wektorach i .
Właściwości produktu wektorowego:
4 0 . , jeśli wektory i są współliniowe lub jeden z tych wektorów ma wartość zero.
Przykład 3. Równoległobok zbudowany jest na wektorach i , gdzie , , . Oblicz długość przekątnych tego równoległoboku, kąt między przekątnymi i pole równoległoboku.
Rozwiązanie. Konstrukcję wektorów pokazano na rysunku 2.16, konstrukcję równoległoboku na tych wektorach pokazano na rysunku 2.17.
Spróbujmy rozwiązać analitycznie ten problem. Wyraźmy wektory określające przekątne skonstruowanego równoległoboku poprzez wektory i , a następnie poprzez i . Znaleźliśmy , . Następnie znajdujemy długości przekątnych równoległoboku jako długości skonstruowanych wektorów
Kąt między przekątnymi równoległoboku jest oznaczony przez . Następnie ze wzoru na iloczyn skalarny wektorów mamy:
Stąd, .
Korzystając z właściwości iloczynu wektorowego, obliczamy pole równoległoboku:
Niech będą dane trzy wektory , i . Wyobraźmy sobie, że wektor jest mnożony wektorowo przez wektor, a powstały wektor jest mnożony skalarnie przez wektor, wyznaczając w ten sposób liczbę. Nazywa się to skalarem wektorowym lub praca mieszana trzy wektory , i . Oznaczone przez lub.
Dowiedzmy Się geometryczne znaczenie produktu mieszanego (Rysunek 2.18). Niech , , nie będzie współpłaszczyznowe. Zbudujmy równoległościan na tych wektorach jak na krawędziach. Grafika wektorowa istnieje wektor, którego moduł jest równy polu równoległoboku (podstawy równoległościanu), zbudowany na wektorach i i jest skierowany prostopadle do płaszczyzny równoległoboku.
Iloczyn skalarny (równy iloczynowi modułu wektora i rzutu na ). Wysokość zbudowanego równoległościanu wynosi całkowita wartość tę projekcję. W konsekwencji wartość bezwzględna iloczynu mieszanego trzech wektorów jest równa objętości równoległościanu zbudowanego na wektorach , i , tj. .
Stąd objętość trójkątnej piramidy zbudowanej na wektorach i jest obliczana według wzoru.
Zauważmy jeszcze coś właściwości produktu mieszanego wektory.
1 o. Znak iloczynu jest dodatni, jeśli wektory , , i tworzą system o tej samej nazwie co główny, w przeciwnym razie jest ujemny.
Naprawdę, iloczyn skalarny jest dodatni, jeśli kąt pomiędzy i jest ostry, i ujemny, jeśli kąt jest rozwarty. Przy kącie ostrym między i wektory i znajdują się po jednej stronie w stosunku do podstawy równoległościanu, a zatem od końca wektora obrót od do będzie widoczny w taki sam sposób, jak od końca wektora , tj. w kierunku dodatnim (przeciwnie do ruchu wskazówek zegara).
Na kąt rozwarty i wektory i znajdują się według różne strony względem płaszczyzny równoległoboku leżącej u podstawy równoległościanu, a zatem od końca wektora obrót od k jest widoczny w kierunku ujemnym (zgodnie z ruchem wskazówek zegara).
2 o Iloczyn mieszany nie zmienia się, gdy jego czynniki są uporządkowane cyklicznie: .
3 o Kiedy dowolne dwa wektory zostaną przestawione, zmieszany iloczyn zmienia tylko znak. Na przykład, , . , . - nieznane systemy.
System(3.1) nazywa się jednorodny , jeśli wszyscy członkowie są wolni . System (3.1) nazywa się heterogeniczny , jeśli przynajmniej jeden z wolni członkowie.
Rozwiązanie systemowe nazywa się zbiorem liczb, gdy podstawiając je do równań układu zamiast odpowiednich niewiadomych, każde równanie układu zamienia się w tożsamość. Układ, który nie ma rozwiązania nazywa się niekompatybilny, Lub kontrowersyjny . Układ, który ma co najmniej jedno rozwiązanie nazywamy wspólny .
Nazywa się wspólny system niektórzy jeśli ona ma jedyna decyzja. Jeśli spójny system ma więcej niż jedno rozwiązanie, nazywa się go niepewny . Układ jednorodny jest zawsze spójny, ponieważ ma co najmniej zerowe rozwiązanie. Wyrażenie na niewiadome, z którego można uzyskać dowolne konkretne rozwiązanie układu, nazywa się decyzja ogólna , a każde konkretne rozwiązanie systemu jest jego rozwiązanie prywatne . Dwa systemy z tymi samymi niewiadomymi równowartość (równowartość ), jeżeli każde rozwiązanie jednego z nich jest rozwiązaniem drugiego lub oba systemy są niespójne.
Rozważmy metody rozwiązywania układów równań liniowych.
Jedną z głównych metod rozwiązywania układów równań liniowych jest metoda Gaussa, Lub metoda sekwencyjna wykluczenie niewiadomych. Istotą tej metody jest sprowadzenie układu równań liniowych do postaci krokowej. W takim przypadku należy przeprowadzić następujące równania: elementarne przemiany :
1. Przekształcanie równań układu.
2. Dodanie kolejnego równania do jednego równania.
3. Mnożenie obu stron równania przez liczbę różną od zera.
W rezultacie system przyjmie postać:
Kontynuując ten proces, eliminujemy niewiadome ze wszystkich równań, zaczynając od trzeciego. Aby to zrobić, pomnóż drugie równanie przez liczby i dodaj do trzeciego, ..., do -tego równania układu. Kolejne etapy metody Gaussa przeprowadza się w podobny sposób. Jeżeli w wyniku przekształceń otrzymamy identyczne równanie, to usuwamy je z układu. Jeżeli na którymś etapie metody Gaussa otrzymamy równanie postaci:
wówczas rozpatrywany system jest niespójny i jego dalsze rozwiązanie ustaje. Jeżeli przy przeprowadzaniu przekształceń elementarnych nie zostanie napotkane równanie postaci (3.2), to w nie więcej niż - krokach układ (3.1) zostanie przekształcony do postaci krokowej:
Aby uzyskać konkretne rozwiązanie układu, konieczne będzie przypisanie określonych wartości wolnym zmiennym w (3.4).
Należy zauważyć, że ponieważ w metodzie Gaussa wszystkie przekształcenia wykonywane są na współczynnikach nieznanych równań i wyrazach wolnych, w praktyce metodę tę stosuje się zwykle do macierzy złożonej ze współczynników niewiadomych i kolumny wolnych wyrazów. Macierz tę nazywa się rozszerzoną. Stosując przekształcenia elementarne, macierz tę sprowadza się do postaci krokowej. Następnie, wykorzystując otrzymaną macierz, rekonstruuje się system i stosuje do niego wszystkie dotychczasowe rozumowania.
Przykład 1. Rozwiąż układ:
Rozwiązanie. Tworzymy rozszerzoną macierz i sprowadzamy ją do postaci krokowej:
~ *) ~ **) ~ ***)
*) - druga linia została pomnożona przez, a trzecia linia została przekreślona.
W tym artykule przyjrzymy się sposobom określenia odległości od punktu do punktu teoretycznie i na przykładzie konkretnych zadań. Na początek wprowadźmy kilka definicji.
Definicja 1
Odległość między punktami jest długością łączącego je odcinka w istniejącej skali. Aby mieć jednostkę długości do pomiaru, konieczne jest ustawienie skali. Dlatego zasadniczo problem znalezienia odległości między punktami rozwiązuje się za pomocą ich współrzędnych na linii współrzędnych, w płaszczyzna współrzędnych lub przestrzeń trójwymiarowa.
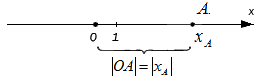
Dane wyjściowe: oś współrzędnych O x i leżący na niej dowolny punkt A. Każdy punkt na prostej ma jedną liczbę rzeczywistą: niech będzie to liczba określona dla punktu A xA, jest to także współrzędna punktu A.
Ogólnie można powiedzieć, że długość pewnego odcinka ocenia się w porównaniu z odcinkiem przyjętym jako jednostka długości w danej skali.
Jeżeli punkt A odpowiada liczbie rzeczywistej całkowitej, to układając sekwencyjnie od punktu O do punktu wzdłuż prostej O A odcinki - jednostki długości, możemy wyznaczyć długość odcinka O A z całkowitej liczby odłożonych odcinków jednostkowych.
Na przykład punkt A odpowiada liczbie 3 - aby dostać się do niego z punktu O, będziesz musiał odłożyć trzy segmenty jednostkowe. Jeśli punkt A ma współrzędną - 4, segmenty jednostkowe układa się w podobny sposób, ale w innym, ujemnym kierunku. Zatem w pierwszym przypadku odległość O A jest równa 3; w drugim przypadku O A = 4.
Jeżeli punkt A ma swoją współrzędną Liczba wymierna, następnie od początku (punkt O) odkładamy całkowitą liczbę odcinków jednostkowych, a następnie niezbędną ich część. Ale geometrycznie nie zawsze jest możliwe dokonanie pomiaru. Na przykład wydaje się trudne wykreślenie ułamka 4 111 na linii współrzędnych.
Stosując powyższą metodę całkowicie niemożliwe jest wykreślenie liczby niewymiernej na linii prostej. Na przykład, gdy współrzędna punktu A wynosi 11. W tym przypadku można przejść do abstrakcji: jeśli podana współrzędna punktu A jest większa od zera, to O A = x A (liczbę przyjmuje się jako odległość); jeśli współrzędna jest mniejsza od zera, to O A = - x A . Ogólnie rzecz biorąc, stwierdzenia te są prawdziwe dla dowolnej liczby rzeczywistej x A.
Reasumując: odległość od początku do punktu odpowiadającego liczbie rzeczywistej na osi współrzędnych wynosi:
- 0 jeśli punkt pokrywa się z początkiem;
- x A, jeśli x A > 0;
- - x A jeśli x A< 0 .
W tym przypadku oczywiste jest, że długość samego odcinka nie może być ujemna, dlatego korzystając ze znaku modułu, odległość od punktu O do punktu A zapisujemy współrzędną xA: O ZA = x A
Prawdziwe będzie następujące stwierdzenie: odległość od jednego punktu do drugiego będzie równa modułowi różnicy współrzędnych. Te. dla punktów A i B leżących na tej samej linii współrzędnych dla dowolnego położenia i mających odpowiadające sobie współrzędne xA I x B: ZA B = x B - x ZA .

Dane wyjściowe: punkty A i B leżące na płaszczyźnie w prostokątnym układzie współrzędnych O x y o podanych współrzędnych: A (x A, y A) i B (x B, y B).
Narysujmy prostopadłe przez punkty A i B do osi współrzędnych O x i O y i otrzymajmy w rezultacie punkty rzutowania: A x, A y, B x, B y. W zależności od położenia punktów A i B możliwe są wówczas następujące opcje:
Jeśli punkty A i B pokrywają się, wówczas odległość między nimi wynosi zero;
Jeżeli punkty A i B leżą na prostej prostopadłej do osi O x (oś odciętych), to punkty te pokrywają się, a | A B | = | A y B y | . Ponieważ odległość między punktami jest równa modułowi różnicy ich współrzędnych, wówczas A y B y = y B - y A, a zatem A B = A y B y = y B - y A.

Jeżeli punkty A i B leżą na prostej prostopadłej do osi O y (osi rzędnych) - analogicznie do poprzedniego akapitu: A B = A x B x = x B - x A

Jeżeli punkty A i B nie leżą na prostej prostopadłej do jednej z osi współrzędnych, odległość między nimi wyznaczymy wyprowadzając wzór obliczeniowy:

Widzimy, że trójkąt A B C ma konstrukcję prostokątną. W tym przypadku A C = A x B x i B C = A y B y. Korzystając z twierdzenia Pitagorasa, tworzymy równość: A B 2 = A C 2 + B C 2 ⇔ A B 2 = A x B x 2 + A y B y 2 , a następnie przekształcamy: A B = A x B x 2 + A y B y 2 = x B - x ZA 2 + y B - y A 2 = (x B - x A) 2 + (y B - y A) 2
Z uzyskanego wyniku wyciągnijmy wniosek: odległość od punktu A do punktu B na płaszczyźnie określa się poprzez obliczenia za pomocą wzoru wykorzystującego współrzędne tych punktów
ZA B = (x B - x A) 2 + (y B - y A) 2
Otrzymany wzór potwierdza także wcześniej sformułowane twierdzenia dla przypadków zbieżności punktów lub sytuacji, gdy punkty leżą na liniach prostych prostopadłych do osi. Zatem, jeśli punkty A i B się pokrywają, spełniona będzie równość: A B = (x B - x A) 2 + (y B - y A) 2 = 0 2 + 0 2 = 0
Dla sytuacji, gdy punkty A i B leżą na linii prostej prostopadłej do osi x:
A B = (x B - x A) 2 + (y B - y A) 2 = 0 2 + (y B - y A) 2 = y B - y A
Dla przypadku, gdy punkty A i B leżą na prostej prostopadłej do osi rzędnych:
A B = (x B - x A) 2 + (y B - y A) 2 = (x B - x A) 2 + 0 2 = x B - x A
Dane wyjściowe: prostokątny układ współrzędnych O x y z, na którym leżą dowolne punkty o podanych współrzędnych A (x A, y A, z A) i B (x B, y B, z B). Konieczne jest określenie odległości między tymi punktami.
Rozważmy ogólny przypadek, gdy punkty A i B nie leżą na płaszczyźnie równoległej do jednej z płaszczyzn współrzędnych. Narysujmy płaszczyzny prostopadłe do osi współrzędnych przez punkty A i B i uzyskajmy odpowiadające im punkty rzutowe: A x , A y , A z , B x , B y , B z
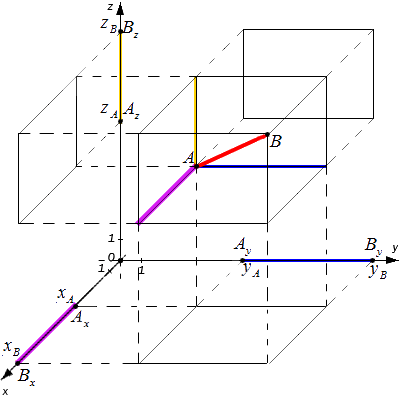
Odległość między punktami A i B jest przekątną powstałego równoległościanu. Zgodnie z konstrukcją wymiarów tego równoległościanu: A x B x , A y B y i A z B z
Z kursu geometrii wiemy, że kwadrat przekątnej równoległościanu jest równy sumie kwadratów jego wymiarów. Na podstawie tego stwierdzenia otrzymujemy równość: A B 2 = A x B x 2 + A y B y 2 + A z B z 2
Korzystając z wniosków uzyskanych wcześniej, piszemy, co następuje:
A x B x = x B - x A , A y B y = y B - y A , A z B z = z B - z A
Przekształćmy wyrażenie:
A B 2 = A x B x 2 + A y B y 2 + A z B z 2 = x B - x A 2 + y B - y A 2 + z B - z A 2 = = (x B - x A) 2 + (y B - y A) 2 + z B - z A 2
Finał wzór na określenie odległości pomiędzy punktami w przestrzeni będzie wyglądać tak:
A B = x B - x ZA 2 + y B - y A 2 + (z B - z A) 2
Otrzymany wzór obowiązuje również w przypadkach, gdy:
Punkty pokrywają się;
Leżą na jednej osi współrzędnych lub na linii prostej równoległej do jednej z osi współrzędnych.
Przykłady rozwiązywania problemów ze znalezieniem odległości między punktami
Przykład 1Dane wyjściowe: podana jest linia współrzędnych i leżące na niej punkty o podanych współrzędnych A (1 - 2) i B (11 + 2). Konieczne jest znalezienie odległości od punktu początkowego O do punktu A oraz pomiędzy punktami A i B.
Rozwiązanie
- Odległość od punktu odniesienia do punktu jest równa modułowi współrzędnej tego punktu, odpowiednio O A = 1 - 2 = 2 - 1
- Odległość pomiędzy punktami A i B definiujemy jako moduł różnicy współrzędnych tych punktów: A B = 11 + 2 - (1 - 2) = 10 + 2 2
Odpowiedź: O A = 2 - 1, A B = 10 + 2 2
Przykład 2
Dane wyjściowe: podano prostokątny układ współrzędnych i leżące na nim dwa punkty A (1, - 1) i B (λ + 1, 3). λ jest pewną liczbą rzeczywistą. Konieczne jest znalezienie wszystkich wartości tej liczby, przy których odległość A B będzie równa 5.
Rozwiązanie
Aby znaleźć odległość między punktami A i B, należy skorzystać ze wzoru A B = (x B - x A) 2 + y B - y A 2
Podstawiając rzeczywiste wartości współrzędnych otrzymujemy: A B = (λ + 1 - 1) 2 + (3 - (- 1)) 2 = λ 2 + 16
Korzystamy również z istniejącego warunku, że A B = 5 i wtedy równość będzie prawdziwa:
λ 2 + 16 = 5 λ 2 + 16 = 25 λ = ± 3
Odpowiedź: A B = 5, jeśli λ = ± 3.
Przykład 3
Dane wyjściowe: przestrzeń trójwymiarową określa się w prostokątnym układzie współrzędnych O x y z i leżących w niej punktach A (1, 2, 3) i B - 7, - 2, 4.
Rozwiązanie
Aby rozwiązać problem, używamy wzoru A B = x B - x A 2 + y B - y A 2 + (z B - z A) 2
Podstawiając wartości rzeczywiste otrzymujemy: A B = (- 7 - 1) 2 + (- 2 - 2) 2 + (4 - 3) 2 = 81 = 9
Odpowiedź: | A B | = 9
Jeśli zauważysz błąd w tekście, zaznacz go i naciśnij Ctrl+Enter
Rozwiązywaniu problemów matematycznych często towarzyszą uczniom liczne trudności. Głównym celem naszej witryny jest pomaganie uczniowi w radzeniu sobie z tymi trudnościami, a także nauczenie go stosowania istniejącej wiedzy teoretycznej przy rozwiązywaniu konkretnych problemów we wszystkich sekcjach kursu z przedmiotu „Matematyka”.
Przystępując do rozwiązywania zadań z danego tematu, uczniowie powinni potrafić skonstruować punkt na płaszczyźnie wykorzystując jego współrzędne, a także znaleźć współrzędne danego punktu.
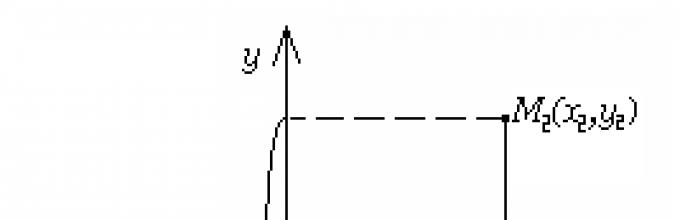
Obliczenia odległości pomiędzy dwoma punktami A(x A; y A) i B(x B; y B) na płaszczyźnie dokonuje się za pomocą wzoru re = √((x A – x B) 2 + (y A – y B) 2), gdzie d jest długością odcinka łączącego te punkty na płaszczyźnie.
Jeżeli jeden z końców odcinka pokrywa się z początkiem współrzędnych, a drugi ma współrzędne M(x M; y M), to wzór na obliczenie d będzie miał postać OM = √(x M 2 + y M 2 ).
1. Obliczanie odległości pomiędzy dwoma punktami na podstawie podanych współrzędnych tych punktów
Przykład 1.
Znajdź długość odcinka łączącego punkty A(2; -5) i B(-4; 3) na płaszczyźnie współrzędnych (rys. 1).
Rozwiązanie.
Stwierdzenie problemu stwierdza: x A = 2; x B = -4; y A = -5 i y B = 3. Znajdź d.
Stosując wzór d = √((x A – x B) 2 + (y A – y B) 2), otrzymujemy:
d = AB = √((2 – (-4)) 2 + (-5 – 3) 2) = 10.
2. Obliczanie współrzędnych punktu znajdującego się w równej odległości od trzech podanych punktów
Przykład 2.
Znajdź współrzędne punktu O 1, który jest w równej odległości od trzech punktów A(7; -1), B(-2; 2) i C(-1; -5).
Rozwiązanie.
Z sformułowania warunków problemu wynika, że O 1 A = O 1 B = O 1 C. Niech żądany punkt O 1 ma współrzędne (a; b). Korzystając ze wzoru d = √((x A – x B) 2 + (y A – y B) 2) znajdujemy:
O 1 ZA = √((a – 7) 2 + (b + 1) 2);
O 1 B = √((a + 2) 2 + (b – 2) 2);
O 1 do = √((a + 1) 2 + (b + 5) 2).
Stwórzmy układ dwóch równań:
(√((a – 7) 2 + (b + 1) 2) = √((a + 2) 2 + (b – 2) 2),
(√((a – 7) 2 + (b + 1) 2) = √((a + 1) 2 + (b + 5) 2).
Po podniesieniu lewej i prawej strony równań do kwadratu piszemy:
((a – 7) 2 + (b + 1) 2 = (a + 2) 2 + (b – 2) 2,
((a – 7) 2 + (b + 1) 2 = (a + 1) 2 + (b + 5) 2.
Upraszczając, napiszmy
(-3a + b + 7 = 0,
(-2a – b + 3 = 0.
Po rozwiązaniu układu otrzymujemy: a = 2; b = -1.
Punkt O 1 (2; -1) jest w równej odległości od trzech punktów określonych w warunku, które nie leżą na tej samej linii prostej. Ten punkt jest środkiem okręgu przechodzącego przez trzy dane punkty (ryc. 2).
3. Obliczanie odciętej (rzędnej) punktu leżącego na osi odciętej (rzędnej) i znajdującego się na podana odległość od tego punktu
Przykład 3.
Odległość od punktu B(-5; 6) do punktu A leżącego na osi Wółu wynosi 10. Znajdź punkt A.
Rozwiązanie.
Z sformułowania warunków problemu wynika, że rzędna punktu A jest równa zeru i AB = 10.
Oznaczając odciętą punktu A przez a, piszemy A(a; 0).
AB = √((a + 5) 2 + (0 – 6) 2) = √((a + 5) 2 + 36).
Otrzymujemy równanie √((a + 5) 2 + 36) = 10. Upraszczając to, mamy
za 2 + 10a – 39 = 0.
Pierwiastkami tego równania są a 1 = -13; i 2 = 3.
Otrzymujemy dwa punkty A 1 (-13; 0) i A 2 (3; 0).
Badanie:
ZA 1 B = √((-13 + 5) 2 + (0 – 6) 2) = 10.
ZA 2 B = √((3 + 5) 2 + (0 – 6) 2) = 10.
Oba uzyskane punkty są odpowiednie w zależności od warunków problemu (ryc. 3).
4. Obliczenie odciętej (rzędnej) punktu leżącego na osi odciętej (rzędnej) i znajdującego się w tej samej odległości od dwóch danych punktów
Przykład 4.
Znajdź punkt na osi Oy, który znajduje się w tej samej odległości od punktów A (6, 12) i B (-8, 10).
Rozwiązanie.
Niech współrzędne punktu wymaganego przez warunki zadania, leżącego na osi Oy, będą wynosić O 1 (0; b) (w punkcie leżącym na osi Oy odcięta wynosi zero). Z warunku wynika, że O 1 A = O 1 B.
Korzystając ze wzoru d = √((x A – x B) 2 + (y A – y B) 2) znajdujemy:
O 1 ZA = √((0 – 6) 2 + (b – 12) 2) = √(36 + (b – 12) 2);
O 1 B = √((a + 8) 2 + (b – 10) 2) = √(64 + (b – 10) 2).
Mamy równanie √(36 + (b – 12) 2) = √(64 + (b – 10) 2) lub 36 + (b – 12) 2 = 64 + (b – 10) 2.
Po uproszczeniu otrzymujemy: b – 4 = 0, b = 4.
Punkt O 1 (0; 4) wymagany przez warunki problemu (ryc. 4).
5. Obliczanie współrzędnych punktu znajdującego się w tej samej odległości od osi współrzędnych i jakiegoś zadanego punktu
Przykład 5.
Znajdź punkt M położony na płaszczyźnie współrzędnych w tej samej odległości od osi współrzędnych i punktu A(-2; 1).
Rozwiązanie.
Wymagany punkt M, podobnie jak punkt A(-2; 1), znajduje się w drugim kącie współrzędnych, ponieważ jest w równej odległości od punktów A, P 1 i P 2 (ryc. 5). Odległości punktu M od osi współrzędnych są takie same, zatem jego współrzędne będą wynosić (-a; a), gdzie a > 0.
Z warunków zadania wynika, że MA = MR 1 = MR 2, MR 1 = a; MP 2 = |-a|,
te. |-a| = za.
Korzystając ze wzoru d = √((x A – x B) 2 + (y A – y B) 2) znajdujemy:
MA = √((-a + 2) 2 + (a – 1) 2).
Ułóżmy równanie:
√((-а + 2) 2 + (а – 1) 2) = а.
Po podniesieniu do kwadratu i uproszczeniu mamy: a 2 – 6a + 5 = 0. Rozwiąż równanie, znajdź a 1 = 1; i 2 = 5.
Otrzymujemy dwa punkty M 1 (-1; 1) i M 2 (-5; 5), które spełniają warunki zadania. 
6. Obliczenie współrzędnych punktu znajdującego się w tej samej określonej odległości od osi odciętej (rzędnej) i od zadanego punktu
Przykład 6.
Znajdź punkt M taki, że jego odległość od osi rzędnych i od punktu A(8; 6) jest równa 5.
Rozwiązanie.
Z warunków zadania wynika, że MA = 5, a odcięta punktu M jest równa 5. Niech rzędna punktu M będzie równa b, wtedy M(5; b) (ryc. 6).
Zgodnie ze wzorem d = √((x A – x B) 2 + (y A – y B) 2) mamy:
MA = √((5 – 8) 2 + (b – 6) 2).
Ułóżmy równanie:
√((5 – 8) 2 + (b – 6) 2) = 5. Upraszczając otrzymamy: b 2 – 12b + 20 = 0. Pierwiastkami tego równania są b 1 = 2; b 2 = 10. Istnieją więc dwa punkty spełniające warunki zadania: M 1 (5; 2) i M 2 (5; 10).
Wiadomo, że wielu studentów niezależna decyzja problemy wymagają ciągłych konsultacji w sprawie technik i metod ich rozwiązywania. Często uczeń nie jest w stanie znaleźć sposobu na rozwiązanie problemu bez pomocy nauczyciela. Na naszej stronie internetowej student może uzyskać niezbędne porady dotyczące rozwiązywania problemów.
Nadal masz pytania? Nie wiesz, jak znaleźć odległość między dwoma punktami na płaszczyźnie?
Aby uzyskać pomoc korepetytora zarejestruj się.
Pierwsza lekcja jest bezpłatna!
stronie internetowej, przy kopiowaniu materiału w całości lub w części wymagany jest link do źródła.







